

Описание

L298N L298P 4A Dual-канальный драйвер двигателей модуль двигатель щит R3 для Arduino
Описание:
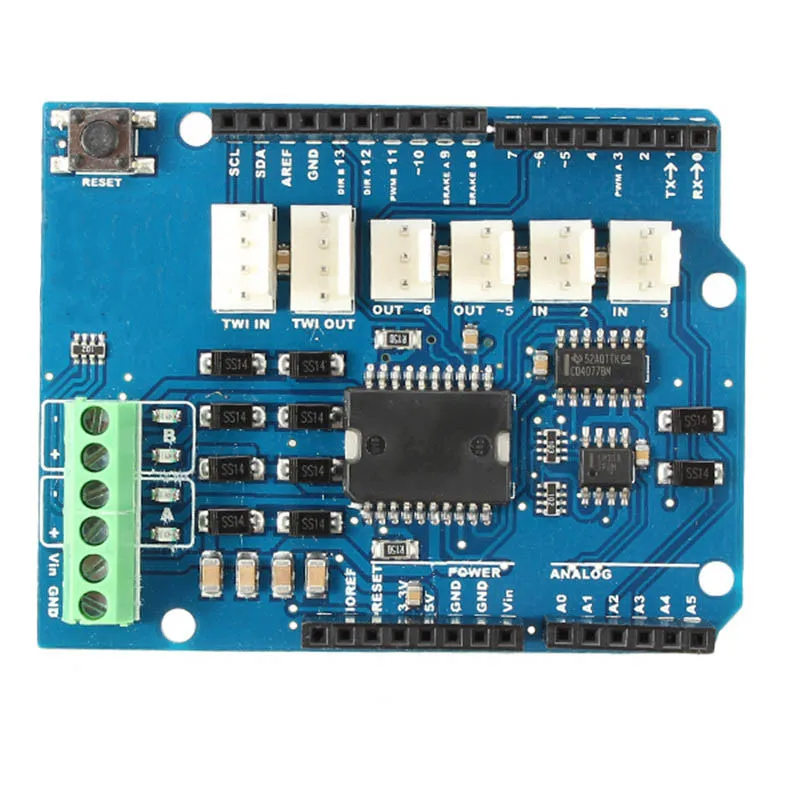
Щит двигателя основан на L298, который является двойным полномостовым драйвером, предназначенным для управления индуктивными нагрузками, такими как реле,
Соленоиды, DC и шаговые двигатели. Он позволяет управлять двумя моторами постоянного тока с вашей платой Arduino, контролируя скорость и направление каждого отдельно. Вы также можете измерить поглощение тока мотора каждого мотора, среди других особенностей. Щит совместим с TinkerKit,
Что означает, что вы можете быстро создавать проекты, подключая модули TinkerKit к плате.
Особенности:
-Рабочее напряжение: 5 V ~ 12 V
-Контроллер двигателя: L298P, диски 2 мотора постоянного тока или 1 шаговый двигатель
-Максимальный ток: 2А на канал или 4А Макс (с внешним источником питания)
-Измерение тока: 1,65 в/а
-Бесплатная остановка хода и функция тормоза
О мощности:
Защита двигателя должна питаться только от внешнего источника питания.
Потому что L298 IC, установленный на щитке, имеет два отдельных подключения питания,
Один для логики и один для водителя электропитания. Требуемый ток двигателя часто превышает максимальный ток USB.
Внешнее (не USB) Питание может исходить от адаптера переменного тока в постоянный ток (настенного бородавки) или от аккумулятора.
Адаптер можно подключить, включив 2,1 мм центральный положительный штекер в разъем питания для платы Arduino на
Какой экран двигателя установлен или путем подключения проводов, которые водят блок питания к винтовым клеммам vin-и GND,
Заботясь о том, чтобы почтить полярность.
К возможному повреждению платы Arduino, на которой установлен экран,
Рекомендуется использовать внешний источник питания, обеспечивающий напряжение от 7 до 12 В.
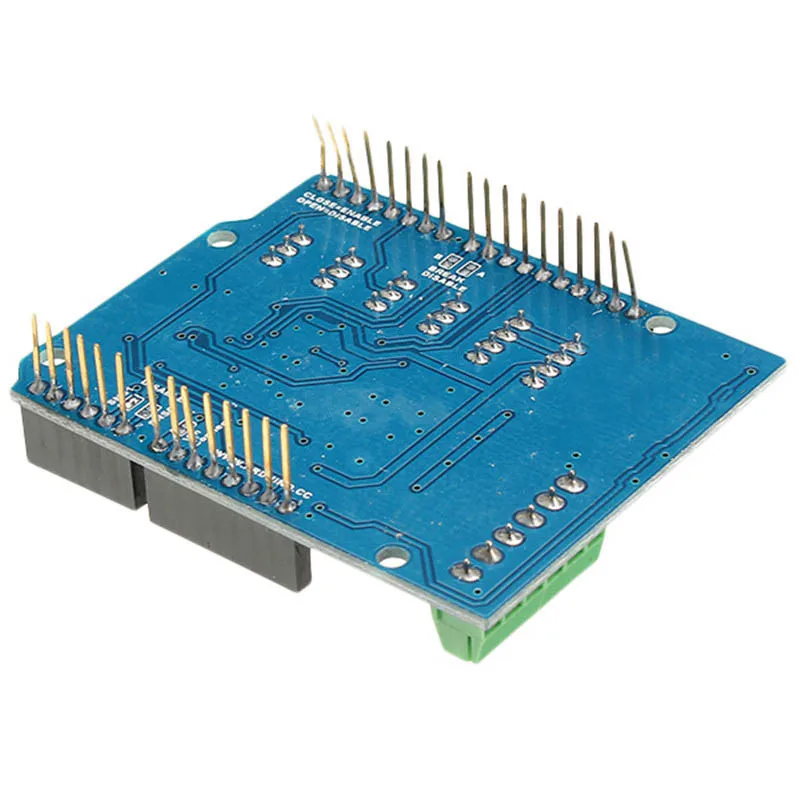
Если ваш мотор требует более 9 В, мы рекомендуем вам отделить линии питания экрана и платы для Arduino на
На котором установлен щит. Это возможно, разрезав перемычку «vin-подключения», размещенную на задней стороне щитка.
Абсолютный лимит для вин На винтовых клеммах составляет 18 В.
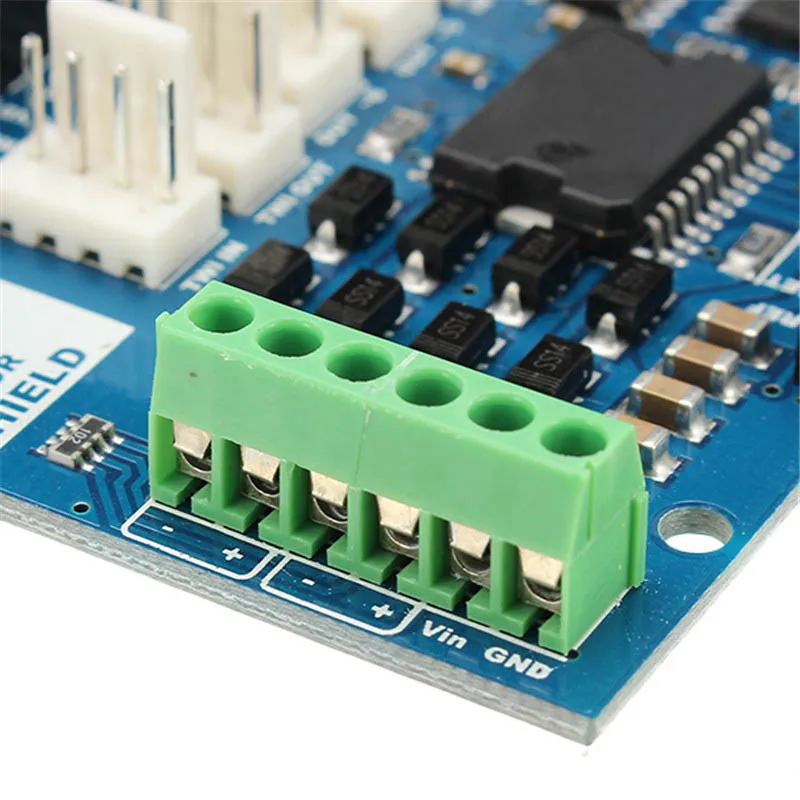
Контакты питания следующие:
Вин на винтовой клеммной колодке, является входное напряжение к мотору, подключенному к щиту.
Внешний источник питания, подключенный к этому контакту, также обеспечивает питание для платы Arduino, на которой установлен.
Разрезая перемычку "vin-коннект", вы делаете это выделенной линией питания для мотора.
GND заземление на винтовой клеммной колодке.
Щит может поставлять 2 Ампера на канал, в общей сложности максимум 4 Ампера.
О входе и выходе:
Этот щит имеет два отдельных канала, называемых A и B, что каждый использует 4 из контактов для Arduino, чтобы управлять или чувствовать мотор.
Всего на этом щите используется 8 контактов.
Вы можете использовать каждый канал отдельно для управления двумя моторами постоянного тока или комбинировать их для управления одним однополярным шаговым двигателем.
Контакты щита, разделенные по каналу, показаны в таблице ниже:
Функция
Пин на Ch. А
Пин на Ch. B
Направление
D12
D13
PWM
D3
D11
Стоп-сигнал
D9
D8
Ток срабатывания
A0
A1
Если вам не нужен тормоз и датчик тока, а также вам нужно больше контактов для вашего приложения, вы можете отключить эти функции, отрезав соответствующие перемычки на задней стороне экрана.
Дополнительные розетки на щитке описаны ниже:
Винтовой терминал для подключения двигателей и их источника питания.
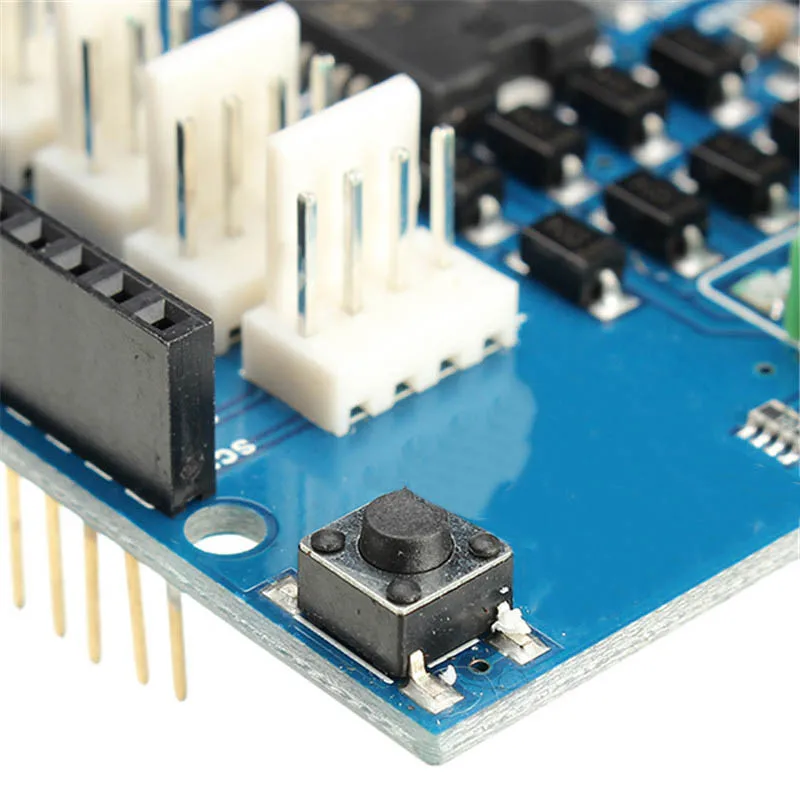
2 разъема TinkerKit для двух аналоговых входов (в белом цвете), подключенных к A2 и A3.
2 разъема TinkerKit для двух выходов Aanlog (в оранжевом цвете посередине), подключенных к выходам PWM на контактах D5 и D6.
2 разъема TinkerKit для интерфейса TWI (в белом цвете с 4 контактами), один для входа и другой для выхода.
Моторы соединения:
Коллекторный двигатель постоянного тока. Вы можете управлять двумя щетками моторов постоянного тока, подключив два провода каждого в (+) и (-) винтовые клеммы для каждого канала А и B. таким образом вы можете контролировать его направление, установив высокие или низкие контакты DIR Aand DIR B, Вы можете управлять скоростью, изменяя значения цикла ШИМ A и ШИМ B. Тормоза A и тормоза B штифты, если установить высокий, будут эффективно тормозить двигатели постоянного тока, а не позволяют им замедлить, уменьшая мощность. Вы можете измерить ток, проходящий через двигатель постоянного тока, считывая контакты SNS0 и sns1. На каждом канале будет напряжение, пропорциональное измеренному току, которое можно считывать как обычный аналоговый вход, через функцию analogRead () на аналоговом входе A0 и A1. Для Вашего удобства он откалиброван, чтобы быть 3,3 В, когда канал обеспечивает свой максимальный возможный ток, то есть 2 А.
Посылка включает в себя:
Модуль драйвера двигателя-1 шт.
Описание:
Щит двигателя основан на L298, который является двойным полномостовым драйвером, предназначенным для управления индуктивными нагрузками, такими как реле,
Соленоиды, DC и шаговые двигатели. Он позволяет управлять двумя моторами постоянного тока с вашей платой Arduino, контролируя скорость и направление каждого отдельно. Вы также можете измерить поглощение тока мотора каждого мотора, среди других особенностей. Щит совместим с TinkerKit,
Что означает, что вы можете быстро создавать проекты, подключая модули TinkerKit к плате.
Особенности:
-Рабочее напряжение: 5 V ~ 12 V
-Контроллер двигателя: L298P, диски 2 мотора постоянного тока или 1 шаговый двигатель
-Максимальный ток: 2А на канал или 4А Макс (с внешним источником питания)
-Измерение тока: 1,65 в/а
-Бесплатная остановка хода и функция тормоза
О мощности:
Защита двигателя должна питаться только от внешнего источника питания.
Потому что L298 IC, установленный на щитке, имеет два отдельных подключения питания,
Один для логики и один для водителя электропитания. Требуемый ток двигателя часто превышает максимальный ток USB.
Внешнее (не USB) Питание может исходить от адаптера переменного тока в постоянный ток (настенного бородавки) или от аккумулятора.
Адаптер можно подключить, включив 2,1 мм центральный положительный штекер в разъем питания для платы Arduino на
Какой экран двигателя установлен или путем подключения проводов, которые водят блок питания к винтовым клеммам vin-и GND,
Заботясь о том, чтобы почтить полярность.
К возможному повреждению платы Arduino, на которой установлен экран,
Рекомендуется использовать внешний источник питания, обеспечивающий напряжение от 7 до 12 В.
Если ваш мотор требует более 9 В, мы рекомендуем вам отделить линии питания экрана и платы для Arduino на
На котором установлен щит. Это возможно, разрезав перемычку «vin-подключения», размещенную на задней стороне щитка.
Абсолютный лимит для вин На винтовых клеммах составляет 18 В.
Контакты питания следующие:
Вин на винтовой клеммной колодке, является входное напряжение к мотору, подключенному к щиту.
Внешний источник питания, подключенный к этому контакту, также обеспечивает питание для платы Arduino, на которой установлен.
Разрезая перемычку "vin-коннект", вы делаете это выделенной линией питания для мотора.
GND заземление на винтовой клеммной колодке.
Щит может поставлять 2 Ампера на канал, в общей сложности максимум 4 Ампера.
О входе и выходе:
Этот щит имеет два отдельных канала, называемых A и B, что каждый использует 4 из контактов для Arduino, чтобы управлять или чувствовать мотор.
Всего на этом щите используется 8 контактов.
Вы можете использовать каждый канал отдельно для управления двумя моторами постоянного тока или комбинировать их для управления одним однополярным шаговым двигателем.
Контакты щита, разделенные по каналу, показаны в таблице ниже:
Функция
Пин на Ch. А
Пин на Ch. B
Направление
D12
D13
PWM
D3
D11
Стоп-сигнал
D9
D8
Ток срабатывания
A0
A1
Если вам не нужен тормоз и датчик тока, а также вам нужно больше контактов для вашего приложения, вы можете отключить эти функции, отрезав соответствующие перемычки на задней стороне экрана.
Дополнительные розетки на щитке описаны ниже:
Винтовой терминал для подключения двигателей и их источника питания.
2 разъема TinkerKit для двух аналоговых входов (в белом цвете), подключенных к A2 и A3.
2 разъема TinkerKit для двух выходов Aanlog (в оранжевом цвете посередине), подключенных к выходам PWM на контактах D5 и D6.
2 разъема TinkerKit для интерфейса TWI (в белом цвете с 4 контактами), один для входа и другой для выхода.
Моторы соединения:
Коллекторный двигатель постоянного тока. Вы можете управлять двумя щетками моторов постоянного тока, подключив два провода каждого в (+) и (-) винтовые клеммы для каждого канала А и B. таким образом вы можете контролировать его направление, установив высокие или низкие контакты DIR Aand DIR B, Вы можете управлять скоростью, изменяя значения цикла ШИМ A и ШИМ B. Тормоза A и тормоза B штифты, если установить высокий, будут эффективно тормозить двигатели постоянного тока, а не позволяют им замедлить, уменьшая мощность. Вы можете измерить ток, проходящий через двигатель постоянного тока, считывая контакты SNS0 и sns1. На каждом канале будет напряжение, пропорциональное измеренному току, которое можно считывать как обычный аналоговый вход, через функцию analogRead () на аналоговом входе A0 и A1. Для Вашего удобства он откалиброван, чтобы быть 3,3 В, когда канал обеспечивает свой максимальный возможный ток, то есть 2 А.
Посылка включает в себя:
Модуль драйвера двигателя-1 шт.










Характеристики
- Бренд
- TMOEC
- Состояние
- Новый
- Напряжение электропитания
- other
- Мощность рассеивания
- other
- Рабочая температура
- other
- Номер модели
- No
- Индивидуальное изготовление
- Да
- Упаковка
- SMD
- Тип
- other
- Применение
- other
Сопутствующие товары







