




Описание
MIT машина собака мотор (по индивидуальному заказу)
Коробка передач мотора является планетарной схемой уменьшения передач с коэффициентом уменьшения 6:1 (люфт 0.005rad/0,28 °)

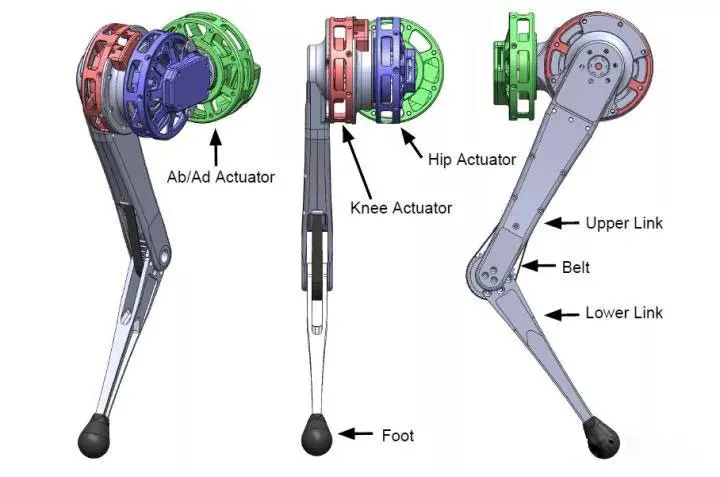
Общий эффект интеграции компактного и легкого двигателя показан на рисунке ниже: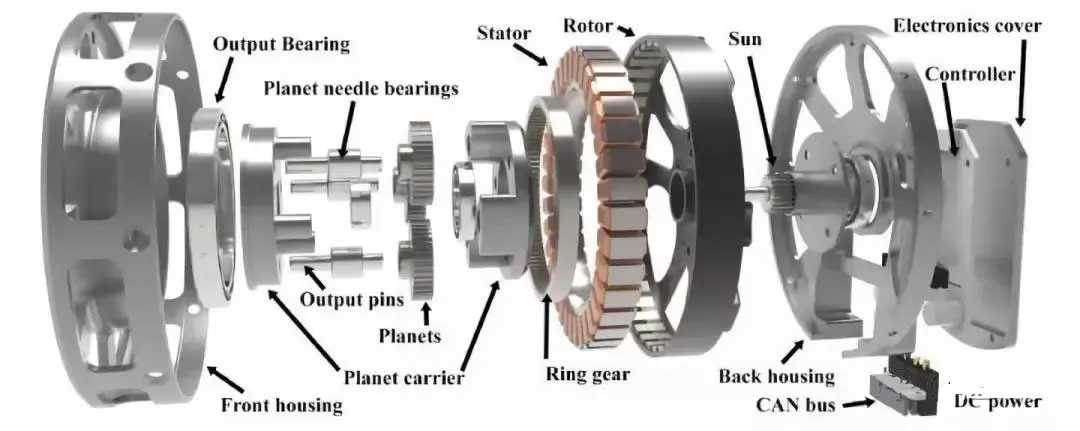
 * Встроенный Магнитный энкодер для измерения информации о положении двигателя, 14 бит
* Встроенный Магнитный энкодер для измерения информации о положении двигателя, 14 бит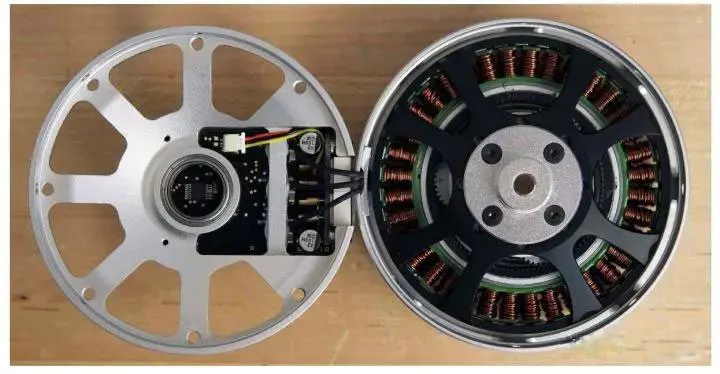
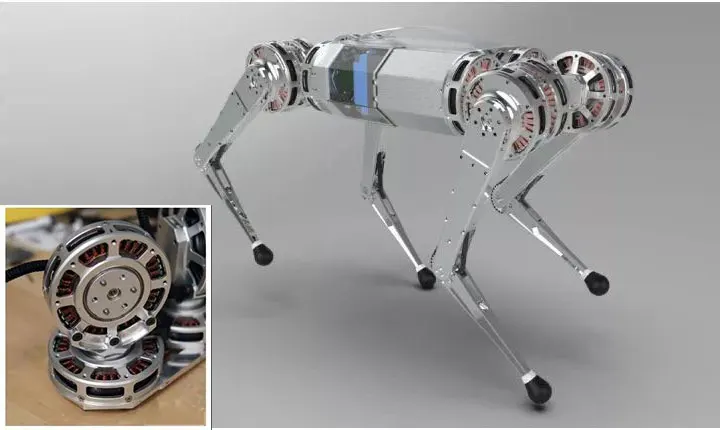

* Общая конструкция конструкции должна соответствовать следующим двум принципу:
1, уменьшить инерцию ноги и качество
2. Увеличьте рабочее пространство для ног
Уменьшите инерцию, используйте более обычное расположение верхней части привода (вдали от земли), одиночная свобода ноги присваивается к традиционной форме наклона, конструкция выглядит следующим образом:
* Характеристики крутящего момента/тока мотора в основном находятся в хорошем линейном соотношении, с погрешностью около 12% при максимальном токе.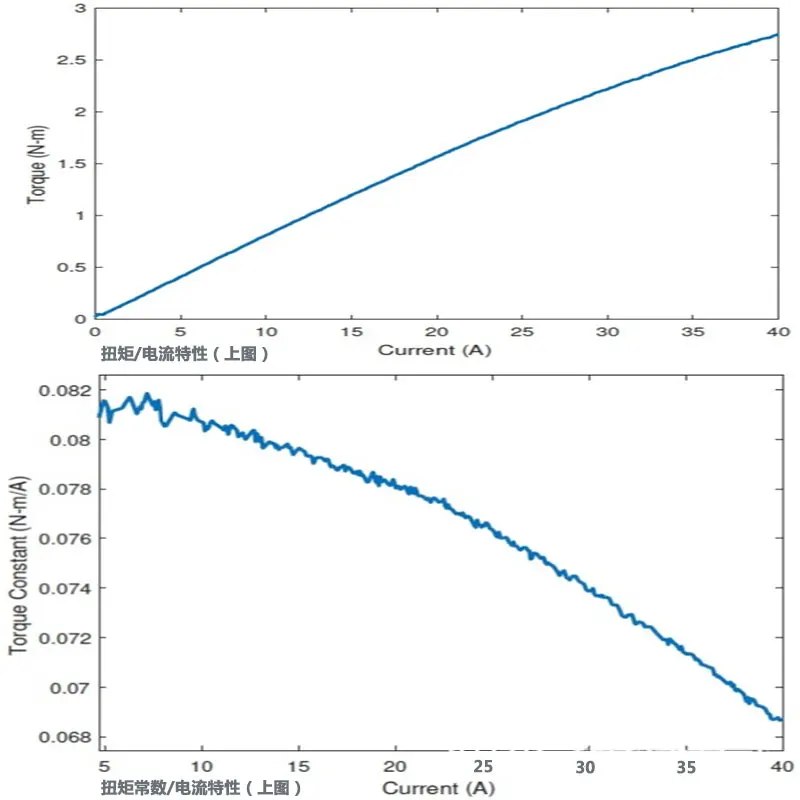
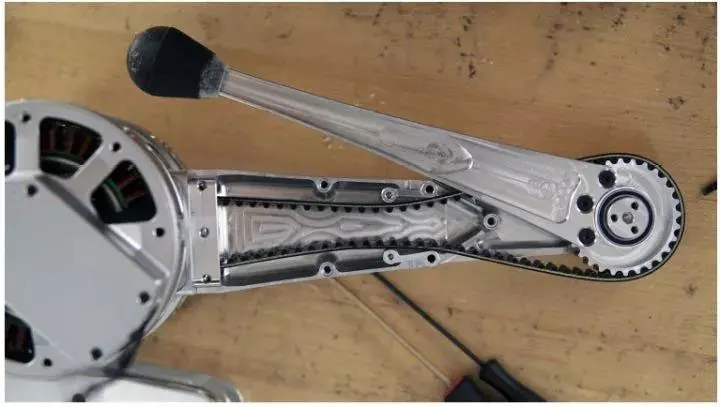
* После того, как наколенник перемещается вверх и вниз, используйте Ременный привод, как показано ниже:
Характеристики крутящего момента/тока мотора в основном находятся в хорошем линейном соотношении, с погрешностью около 12% при максимальном токе.
После того, как коленчатый шарнир перемещается вверх и вниз, используйте ременный привод, как показано ниже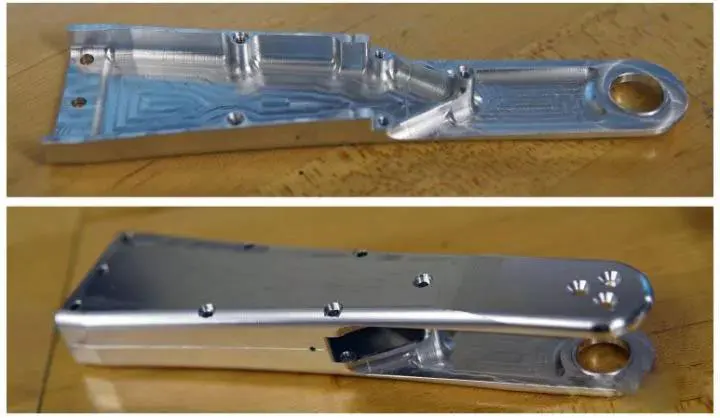
Характеристики
- Тип
- Части Кондиционера / MIT Mechanical Dog Motor
- Сертификация
- Европейский сертификат соответствия
- Применение
- MIT Mechanical Dog Motor
Сопутствующие товары








